Канадський технологічний стартап Orbit Robotics представив новий амбітний проєкт - гуманоїдного робота HELIOS, створеного спеціально для роботи у відкритому космосі та в умовах мікрогравітації. Андроїд не має ніг - замість них інженери оснастили його чотирма повноцінними руками.
Про це пише РБК-Україна з посиланням на Orbit Robotics.
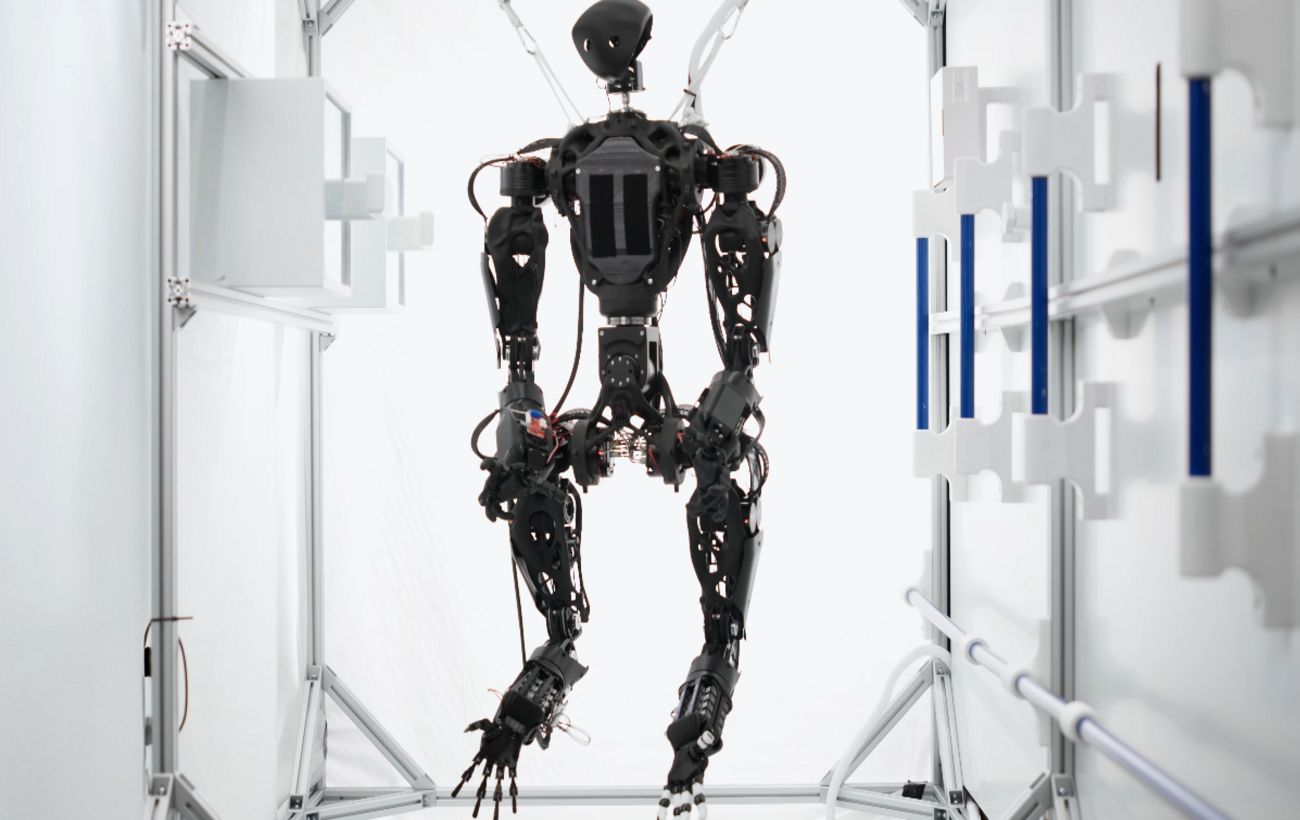
Більше цікавого: МКС втрачає повітря через російський модуль: NASA назвала проблему критичною Чому архітектура HELIOS унікальна?Більшість сучасних людиноподібних роботів створюється для умов земного тяжіння, де ключову роль відіграють стійкість та ходіння на двох ногах. Проте в умовах невагомості ноги втрачають свою практичну цінність. На орбіті пересування та стабілізація тіла залежать від здатності чіплятися за поручні та поверхні.
Саме тому HELIOS отримав радикальну концепцію: чотири руки та чотири кисті, що працюють під управлінням єдиної системи комп'ютерного зору.
Така конструкція дозволяє роботу двома кінцівками міцно утримувати себе на об'єкті (якірне кріплення), а двома іншими - паралельно виконувати сервісні роботи: від обслуговування супутників до збирання орбітальних конструкцій.
Інновації від розробниківНа відміну від важких і жорстких промислових приводів, HELIOS використовує гнучку механічну систему:
Зниження рухомої маси: усі електродвигуни зміщені ближче до плечових суглобів. Це дозволило розробникам полегшити самі кінцівки та підвищити енергоефективність рухів.
Сухожильний привід: зусилля на суглоби передається за допомогою складної мережі кабелів, котушок та шківів. Це робить структуру гнучкою та здатною до делікатних, точних маніпуляцій, які необхідні в космосі.
Суглоби кочення: у ліктях гуманоїда використано механізм роликового контакту, який забезпечує плавний рух із мінімальним тертям, зберігаючи при цьому високу міцність.
Порятунок від дорогої рутини у космосіЗа оцінками Orbit Robotics, сьогодні астронавти на космічних станціях витрачають близько 35% свого часу на рутинні завдання з обслуговування та інвентаризації. Наприклад, лише один цикл розвантаження вантажного корабля забирає у екіпажу майже 50 годин роботи.
Зважаючи на те, що година праці астронавта на орбіті оцінюється приблизно у 140 000 доларів, автоматизація цих процесів збереже колосальні кошти.
Головна мета проєкту - повністю перекласти на HELIOS логістику, переоблік та дрібний ремонт, звільнивши людей для наукових досліджень та експертиз.
Паралельно з HELIOS компанія активно розвиває платформу IKARUS, яку зібрали всього за два місяці. IKARUS є тестовим полігоном для експериментів із телеуправлінням (дистанційним контролем оператора), імітаційним навчанням ШІ-моделей та відпрацюванням технології автономної роботи двома руками.
У майбутньому розробка ляже в основу фінальної версії космічного чотирирукого андроїда.
Ще більше цікавого:
- NASA може пропускати сліди життя у космосі: що виявили науковці
- Вчені використовують інтернет-кабелі не за призначенням: для чого їх хочуть розгорнути у космосі